目錄:上海倍藍光電科技有限公司>>激光雷達>>沙姆激光雷達>> 沙姆激光雷達


| 產地類別 | 進口 | 應用領域 | 醫療衛生,環保,生物產業,能源,交通 |
|---|
沙姆激光雷達
特點
? 真正的遙感
? 距離分辨率
? 3m到3km
? 高靈敏度
? 高速:>3kHz
? 遠距離大氣系統
? 短距離工業系統
? 高分辨率: <1cm
? 關于昆蟲的*的數據
? 顆粒物、氣溶膠和氣體廓線
應用場景
? 安防
? 環境監測
? 質量控制
? 動物群和植物
一、簡介
沙姆激光雷達系統是真正的遠程和便攜系統,它具有xxx的時間和空間分辨率,它可以為用戶提供實的大氣條件的測量結果和定量分析。即使在非常晴朗的條件下(0.15 km-1)高靈敏度的系統也能夠生成可探測的大氣信號。系統采用高度模塊化設計,利用*的波長、極化和探測器配置組合,可以使系統適合一系列不同的應用,比如從大氣中氣體濃度和氣溶膠測量到農業中空中動物群如昆蟲和鳥類的監測。
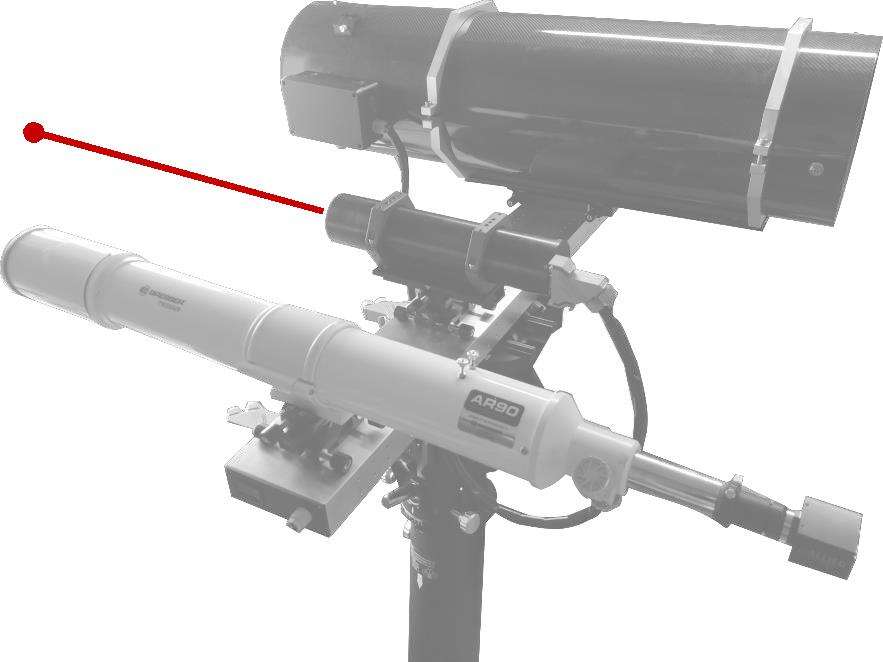
利用SPLR 3500激光雷達系統可以在幾公里范圍內高速測量污染物和氣溶膠,并且能夠準確地找到污染源,有時即使污染源存在時間很短也沒有問題;定量和主動測量在城市環境監測中是非常有價值的。
下面對沙姆激光雷達技術,以及該創新的激光雷達的一些新的應用進行一個簡單介紹。
二、技術原理
傳統激光雷達是基于激光束的飛行時間原理,即在大氣中發射一個光脈沖,大氣的反向散射是時間可分辨的(通常通過復雜的單光子計數器件),從而得到被測信號的距離分辨率。而 SPLR 3500的激光雷達系統采用了沙姆原理,即距離的分辨率是激光束在大氣中成像的結果,因而SPLR 3500激光雷達系統就可以利用連續(CW)二極管激光器,這樣可以很大地降低了激光雷達系統的體積和功耗,一個車載電池就可以保證激光雷達系統運行幾個小時。
SPLR 3500激光雷達系統基于沙姆原理,一次曝光就可以成像整個激光束背散射信號。如圖1所示,探測器上一個像素對應一個*的探測空間范圍。這個成像原理使得激光雷達的空間分辨率和距離具有一個確定的函數關系,而時間分辨率是由探測器的采集速率決定的。在近距離測量時,SPLR 3500激光雷達系統具有比傳統脈沖系統高的空間分辨率,而在遠距離二者的空間分辨率則相當。
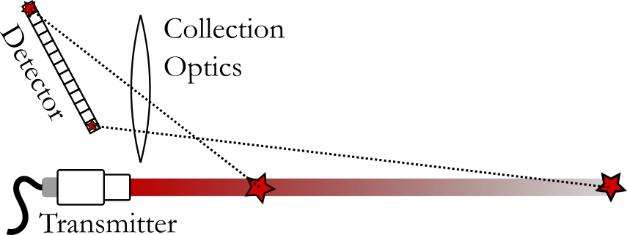
圖1. SPLR 3500沙姆激光雷達系統光束在探測器上成像示意圖
三、應用
? 粒子和氣溶膠
由于米氏散射(Mie Scattering)產生大的可探測的背向散射信號,SPLR 3500激光雷達特別適合大氣中攜帶的粒子,就是所謂的氣溶膠的測量。人們對氣溶膠的許多特性都感興趣,比如濃度、尺寸、形狀和化學組分等;利用SPLR 3500激光雷達,通過調整波長和極化的組合,用戶就可以得到這些特性。
波長相關的背散射截面可以對不同的粒子進行分類,因為在特定的譜段采用兩個或者多個波長的組合方法,氣溶膠會呈現很大的不同。
在環境監測中大氣衰減系數(extinction coefficient km-1)是另一個非常感興趣的重要參數,通過經驗方程衰減系數可以用來計算大氣中的微粒物(PM)。
PM2.5和PM10通常用來分類大氣中粒子的尺寸和濃度,因為它們可能被吸入體內對人類健康造成危害。PM 的測量通常需要在城市的不同地方進行,這就會在定量性和空間上由于相對低的信息價值限制了測量效率。
“分析城市氣溶膠,包括PM10和PM2.5,合理的監測方法應該能夠確定工業輻射源,這是對當地環保xxx的貢獻(在城市功能區)。如果主動的監測能夠與中心監測系統相連并能快速地減少污染源,這樣監測數據的實際利用就會很大地擴展了,這將改善現有監測網絡的效率。”
SPLR 3500激光雷達一個應用案例如圖2所示,這里激光雷達系統對準挪威的一個高速公路的上方,每個經過的車輛都會有粒子排放物,并且能夠被激光雷達系統探測到,同時標記在圖中,激光雷達也能夠顯示排放物隨時間被風吹走延光束的變化, 在圖中大約 80 秒后,強烈的陣風導致的測量湍流。正是由于高時間和空間分辨率,SPLR 3500激光雷達系統能夠實時監測到高速公路上每個經過的車輛,這對于傳統脈沖激光雷達是不可能做到的。
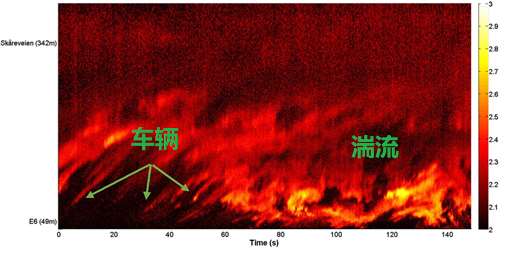
圖2.時間-距離激光雷達對準一條高速公路測量的時間-距離信號,單獨車輛的排放監測。
? 氣體濃度
在差分吸收激光雷達(DIAL)測量時,需要調諧激光波長到氣體的已知吸收線,通過記錄不同波長的響應來計算特定氣體的濃度。從記錄的吸收譜就可能計算出氣體的濃度,溫度和壓力。然而DIAL 對激光光源提出了特殊的要求,即必須是可調諧的窄譜段連續高功率激光器。盡管如此,SPLR 3500激光雷達給出了O2(在760nm)和 CO2(在1.57um)濃度的測量結果。這個測量給出了幾公里距離的空間可分辨的氣體濃度。
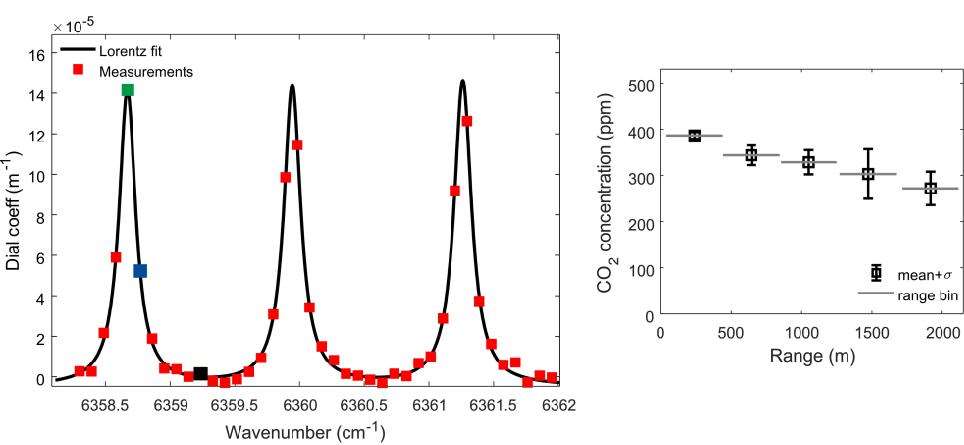
圖3.左圖給出沙姆激光雷達進行DIAL測量的 CO2 的3個吸收峰,右圖給出估算的濃度隨距離的變化。
? 空中動物群監測
采用SPLR 3500激光雷達系統進行空中動物群的研究,特別是在昆蟲學研究方面的應用是一個創新性的工作。通常的方法是設置陷阱,幾天之后回來手工收集昆蟲和計數,采用 SPLR 3500 激光雷達就可以遠距離非破壞地觀察和一個區域的昆蟲。現在用激光雷達系統對準一個你感興趣的區域,這樣你就可以在幾公里的距離范圍內距離可分辨地實時觀察昆蟲活動。取決于具體地方,你可以觀察成百上千的昆蟲在白天飛過激光束,從而獲得它們的飛行方向,尺寸和種類等信息。
測量系統具有kHz的采樣速率,由于經過激光束的昆蟲翅膀的擺動,所以測得的動物群的信號需要進行調制,如圖 4 所示。調制譜含有個體的*信息如翅膀擺動頻率、身體、翅膀尺寸以及諧振的其它信息。利用這些信息就可能對觀察的昆蟲進行分類。人們對昆蟲的行為模式感興趣,SPLR 3500激光雷達系統已經在某個地方用來研究昆蟲、鳥類和蝙蝠的動態行為。
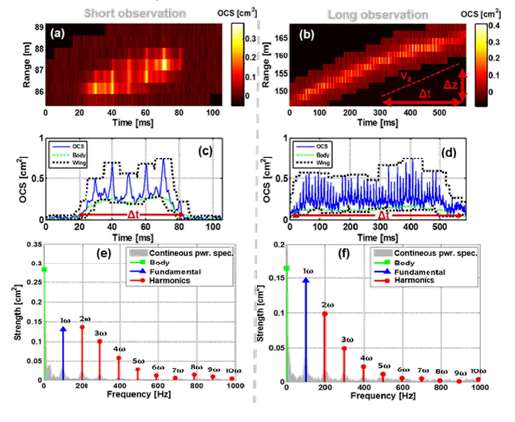
圖4.采用SPLR 3500沙姆激光雷達觀察昆蟲的兩個案例,xxx上一排圖給出由于翅膀擺動導致光截面的變化引起的調制信號的變化,中間一排圖給出的是觀察目標的距離積分信號,xxx下面一排圖則是頻率分析,它給出了觀察的諧振成分。
四、SPLR 3500配置
? 波長
SPLR 3500激光雷達系統激光波長范圍是由硅探測器的響應決定的。可采用的xxx短波長是 400nm,xxx長波長 1050nm;通常有如下不同波長的高功率二極管激光器可選: 405nm, 450nm, 520nm, 532nm, 635nm, 650nm, 780nm, 808nm, 830nm, 850nm, 935nm, 980nm 。
? 偏振
SPLR 3500激光雷達系統可以提供正交偏振配置,即在發射器上安裝同樣波長的兩個二極管激光器,使它們的偏振方向相互垂直。探測器配有偏振濾光片,其偏振方向保證探測器只能探測到 P-偏振光,和S-偏振光相比,P-偏振光具有更高的探測效率。這種配置比如可以從昆蟲群中識別雨滴,或者在大氣中識別固體和液體氣溶膠。
? 探測器
探測器的選擇是根據針對特定應用的激光器來確定的。根據感興趣的波長和偏振的選擇,采用定制的濾光片組可以xxx化地改善激光雷達系統的性能。
五、總結
SPLR 3500沙姆激光雷達系統具有*性,它不是工作在段脈沖的時域,它的距離信息是由幾何光學獲得的,與傳統脈沖高功率激光雷達相比,沙姆激光雷達系統體積小,*,速度快(kHz)。
*的設計可以使系統針對不同應用進行定制和調制,它既可以測量幾十米距離的目標,也可以進行遠距離公里級別測量并具有亞厘米的分辨率。
SPLR 3500激光雷達系統能夠對大氣中粒子,氣溶膠,氣體等,或者其它媒體如水或者石油中的粒子進行高時間分辨率和空間分辨率進行測量。


 2
2


 化工儀器網
化工儀器網